地図からシミュレータ環境を作って、Raspberry Pi Cat動かそう!
概要
地図からGazeboのシミュレータ環境を作成し、Raspberry Pi Catを動かす方法について説明します。
必要な物
| Software | Version |
|---|---|
| ノートPC(Dockerインストール済み) | Ubuntu 22.04(ROS 2 Humble) |
パッケージのビルド&インストール
grep -q "source $HOME/raspicat_map2gazebo_ws/install/setup.bash" ~/.bashrc || echo "source $HOME/raspicat_map2gazebo_ws/install/setup.bash" >> ~/.bashrc
mkdir -p $HOME/raspicat_map2gazebo_ws/src && cd $HOME/raspicat_map2gazebo_ws
git clone https://github.com/CIT-Autonomous-Robot-Lab/raspicat_map2gazebo.git src/raspicat_map2gazebo
vcs import src < src/raspicat_map2gazebo/raspicat_map2gazebo.repos --debug
rosdep update
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
colcon build --symlink-install
source $HOME/.bashrc
シミュレータ環境の作成
map_yaml、map_pgm、config_dirは、絶対パスを入力してください。
world_name、author_name、emailは、任意の名前を入力してください。
ros2 launch raspicat_map2gazebo map2gazebo.launch.xml \
map_yaml:=$(ros2 pkg prefix --share raspicat_map2gazebo)/config/map/map_tsudanuma_2_19.yaml \
map_pgm:=$(ros2 pkg prefix --share raspicat_map2gazebo)/config/map/map_tsudanuma_2_19.pgm \
config_dir:=$(ros2 pkg prefix --share raspicat_map2gazebo)/config \
world_name:=tsudanuma_2_19 \
author_name:=hoge \
email:=hoge.com
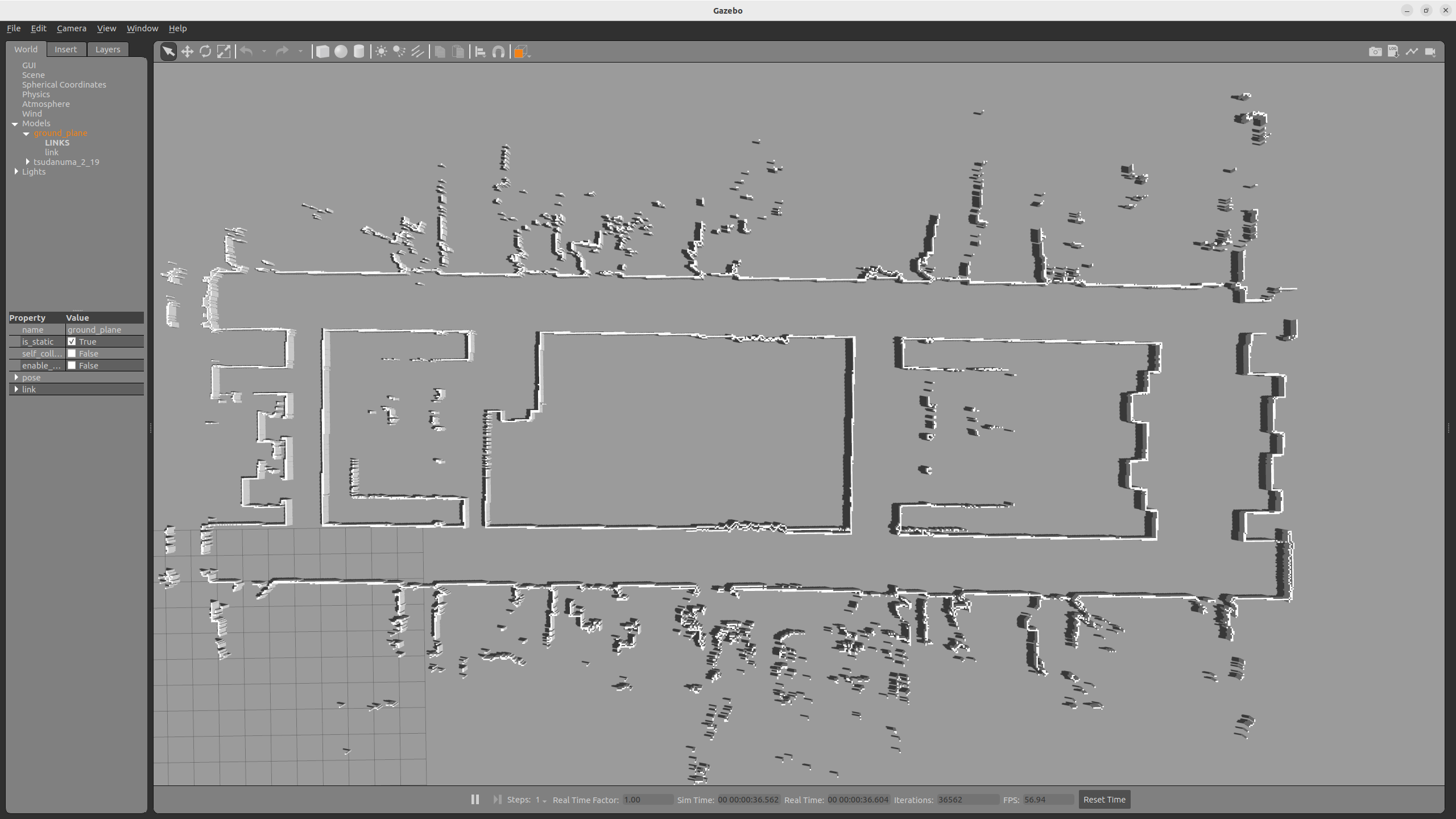
シミュレータ環境のチェック
シミュレータ環境の作成で入力した同じworld_nameを入力してください。
生成したモデルを読み込むためにcolcon buildを実行する必要があります。
cd $HOME/raspicat_map2gazebo_ws
colcon build --symlink-install
ros2 launch raspicat_map2gazebo check_gazebo_world.launch.xml \
world_name:=tsudanuma_2_19
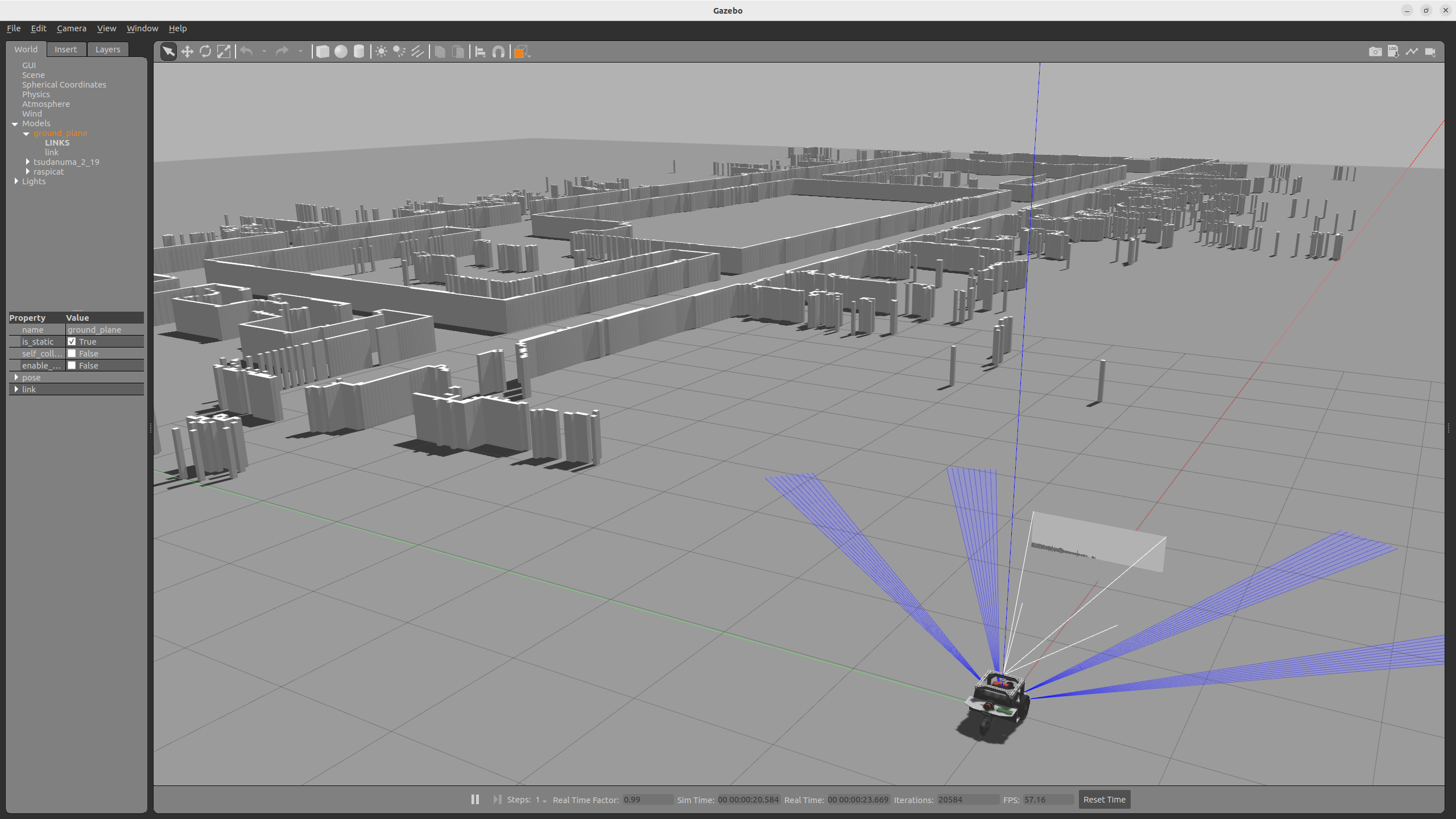
シミュレータ環境の実行
-
環境の立ち上げ
-
ジョイスティックコントローラ操作